智能制造
制造业中零件的缺陷检测及生产配送是十分重要的环节,通常需要多设备(即多智能体)进行协同,因此在智能制造行业中, 多智能体协作、组织及自适应问题是构建制造业智慧空间的重要挑战。下面将就智能制造中缺陷检测及生产配送进行的探索及实践进行简要介绍。
物流AGV小车
自动导引车(AGV)作为一种集成多种先进技术的柔性智能物流装备,具备高度的自主性和灵活性。多AGV组成的智能物流系统正在成为车间物流自动化、柔性化配送的常态。为深入研究制造业群智协同机理,实现群智能体协同增强的理论验证,我们建设了两个多智能体系统平台,分别是由多个Jetbot智能车组成的多智能体协作配送平台(图1.a),以及由多个机甲大师RoboMaster EP组成的多智能体混合任务实验平台(图1.b)。
在多智能体协作配送实验平台中,Jetbot智能车搭载NVIDA的最新嵌入式芯片,具有较强的计算能力,能够模拟制造场景下的智能个体,从而更好地为制造个体与群体智能融合理论的验证提供实际支撑。
在多智能体混合任务实验平台中,RoboMaster EP智能车配置金属材质的机械臂和机械爪,可以环保抓取多种形状的目标物体;多台智能车通过组网通信,能够实现多机协作编队;此外,智能车能够获取红外深度传感器测距信息,实现智能避障和精准自动驾驶多机通信,满足运输场景中对智能车的功能要求。
综上,与单个智能车辆相比,以多辆智能车为主体的多智能体系统平台在时空、功能、信息、资源等方面具有分布式的特性,同时在功能、信息、资源方面又具有冗余性和互补性,这些特征使多智能体系统平台的可靠性、鲁棒性、容错能力明显增强。
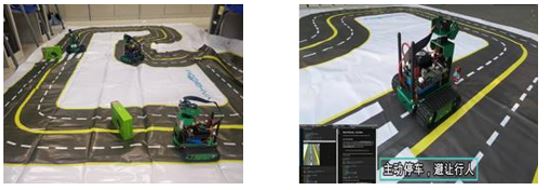
(a)多智能体协作配送实验平台

(b)多智能体混合任务实验平台
图1 智能制造平台协作实践案例
缺陷检测
随着制造业向高精度、高稳定性方向的不断转型,稳定生产高质量的工业级产品成为当前制造业的重点之一,因此工业级产品表面缺陷检测在需要保障产品质量的制造业中发挥着重要的作用。为探究跨要素知识融合和跨场景群智知识迁移模型在表面缺陷检测任务上的表现,笔者团队构建产品缺陷质量检测平台(如图2)。 该平台由分辨率为1280*960工业级相机与1925mm周长的皮带式传送带组成。工业相机用于捕捉零部件图像,作为判别模型的输入。皮带用于模拟真实生产环境中零部件的运输过程,在零部件运输过程中对其进行质量检测。该平台模拟真实的工业制造流水线,及产品质检装置。
在该平台中,我们针对实际工业场景下缺陷类别分布不平衡的问题,提出基于迁移学习的表面缺陷检测方法,通过两阶段训练方案来转移从常见缺陷类别到罕见缺陷类别的知识,并提出了基于度量的表面缺陷检测模型。我们在多种铝材表面缺陷上进行实验并证明了有效性。
